We will now be programming the Zircon.
Your Zircon should look like this
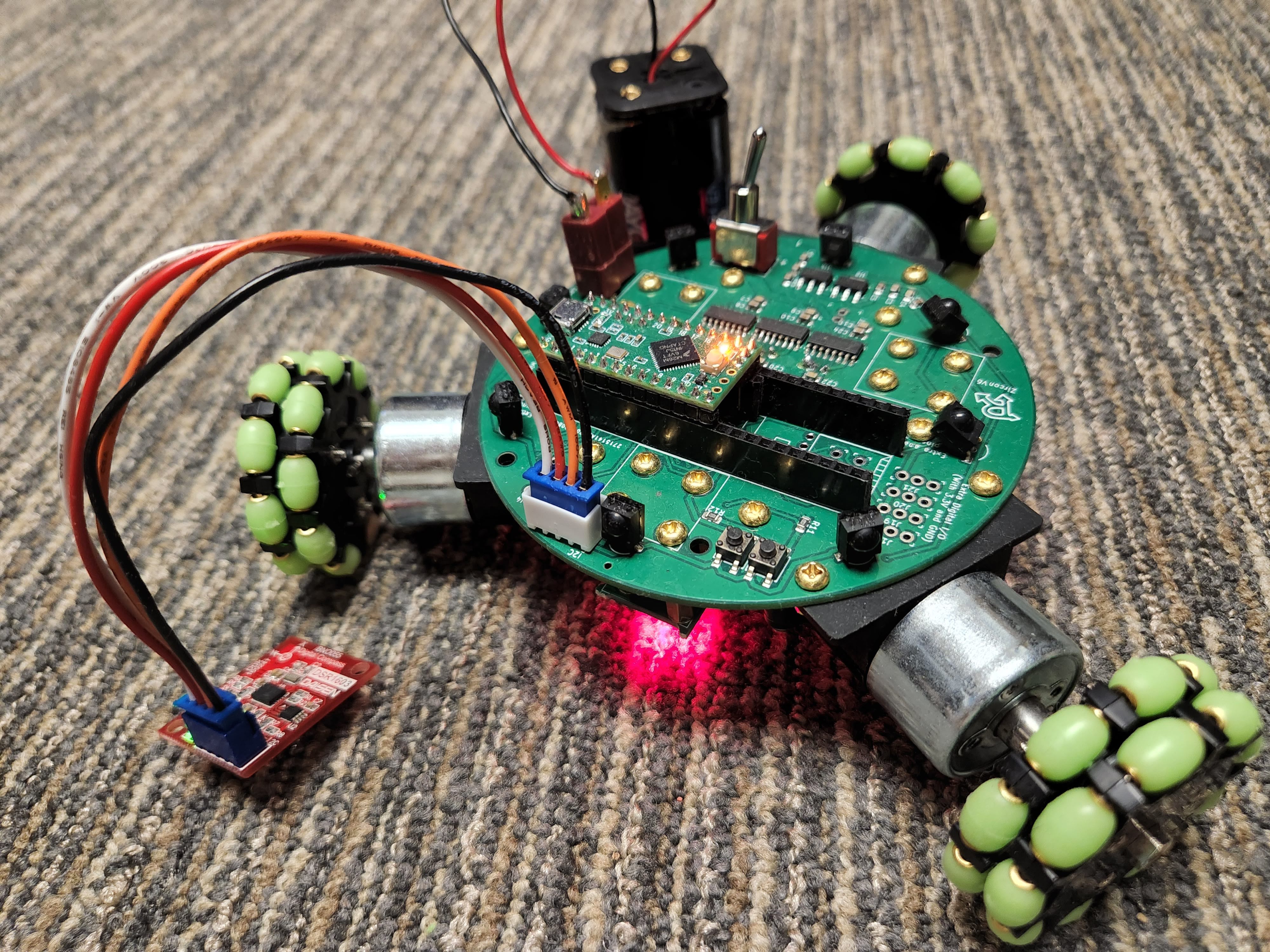
Disconnect the compass sensor. We will connect it back later when we need it. (Having it connected will make the robot go through a calibration step at the start, while not connecting it will bypass it)
Watch the video to get started on the first step: downloading a code editor.
Materials used
| No. | Part Name | Image |
|---|---|---|
| 1. | Finished Zircon x1 | |
| 2. | USB to Micro USB Cable x1 |  |
| 3. | Computer x1 |  |
VS Code and platformio
lib_deps = clamepending/ZirconLib